R.Wieser
2025-01-26 07:13:47 UTC
Reply
PermalinkI've used OpenGL to create a basic 3D coordinate system (which works) with
Z=Up, X=to the right and Y=into the screen.
The thing is that I've picked rotation directions and starting axis for
those rotations in a "I need it to work, and this does" way. :-|
Now I'm at a point where I want to make it conform to a/the standard, and
have done a few websearches for 3D coodinate systems and their specifics.
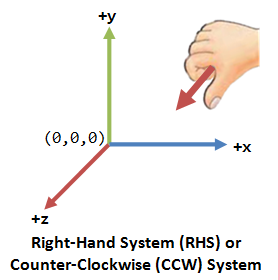
Alas, although I've been able to find pictures of the Y=Up and Z=Up
coordinate systems and even a Z=up, rotation=anti-clockwise description
(right-hand rule), I could not find anything more - which suprises me to be
honest. :-|
What I'm looking for, for both the Y=up and Z=Up coordinate systems :
rotation directions for all three axis/planes, as well as starting axis*.
* Although I've found that for Z=Up the rotation direction is
counter-clockwise I do not know at with axis it starts: +X ? +Y ?
Perhaps -X or -Y ?. No idea. :-(
Regards,
Rudy Wieser